UAV - Unmanned Aerial Vehicel -(ドローン)
UAV(ドローン)による新たな土木技術!

UAVとは(Unmanned Aerial Vehicel)の略称で無人航空機のことを意味します。一般的にドローンと呼ばれており、改正航空法による無人航空機の定義は以下に該当するモノを示します。
- 航空の用に供することができる飛行機、回転翼航空機、滑空機、飛行船、その他政令で定める機器
- 人が乗ることができない機体構造
- 遠隔操作または自動操縦により飛行が可能なもの
- 重量200g以上のもの(バッテリー以外の取り外し可能な付属品の重量は含まない)

『UAV使用機種』
| 『機体写真』 | 『機体仕様』 |
|---|---|
 |
|
 |
|
 |
|
 |
|
 |
|
3Dレーザスキャナ(地上型)
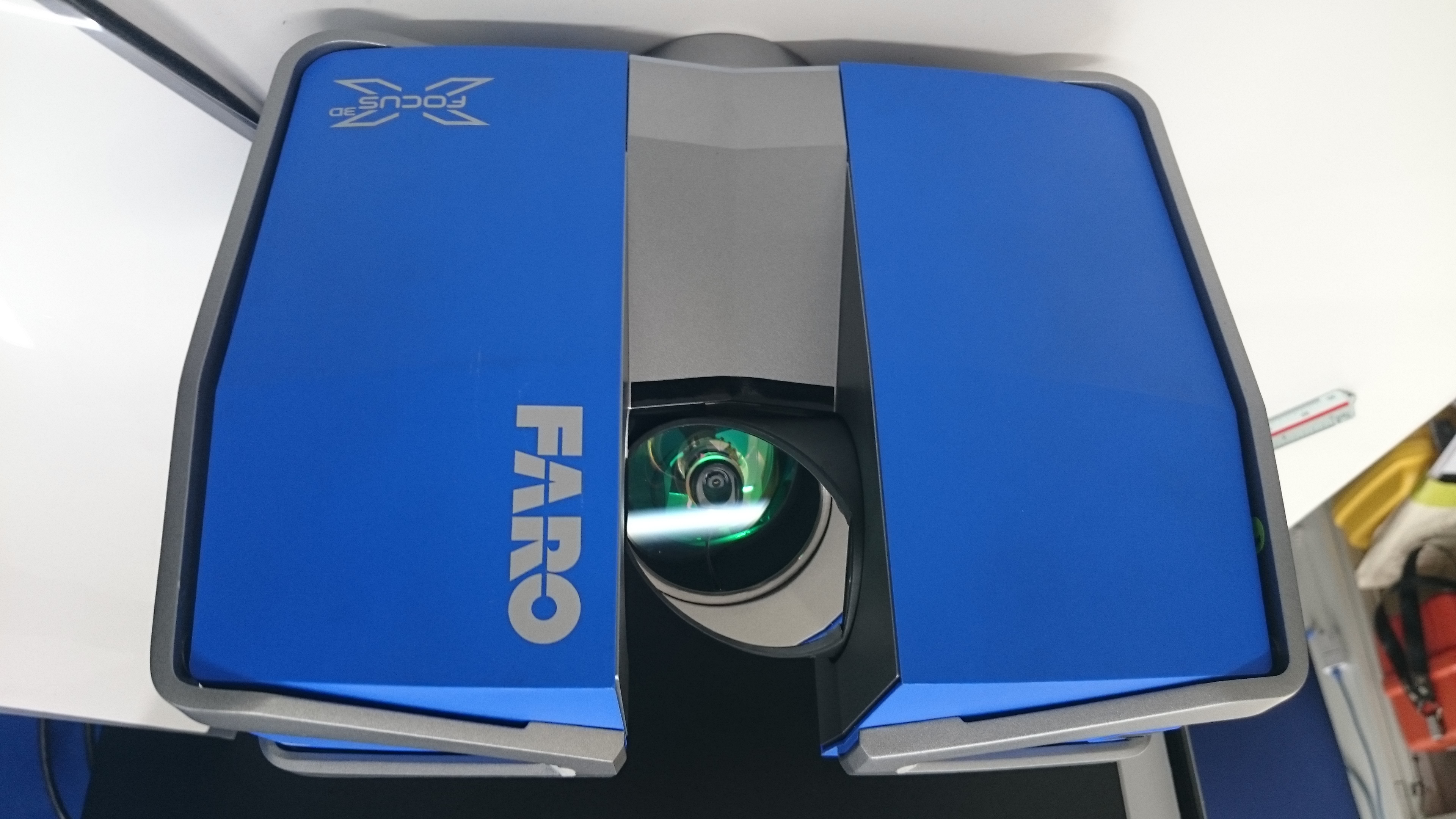
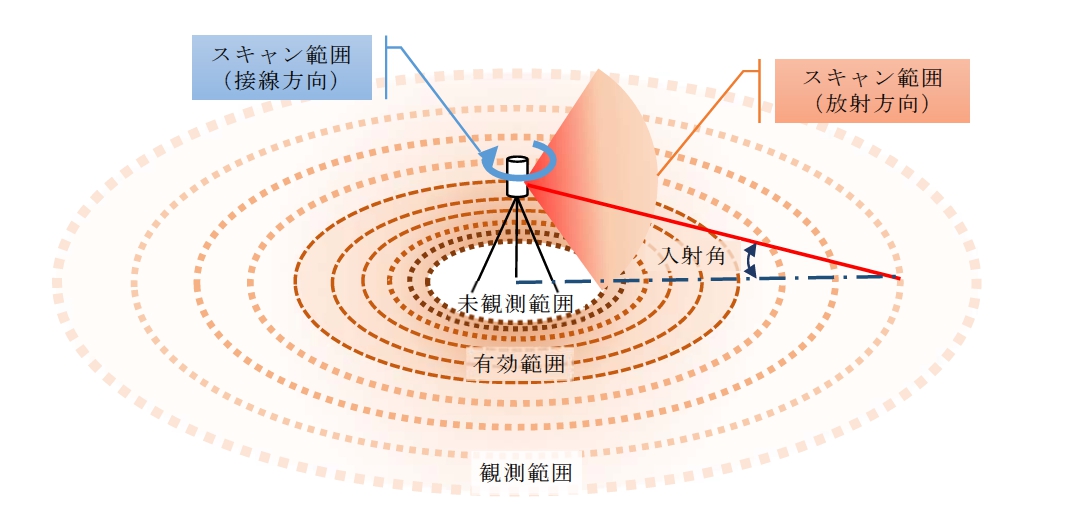
地上レーザースキャナは、図の放射方向にレーザー光を照射すると同時に、本体を接線方向に回転させることで周囲全方向にレーザー光を照射し面的に計測、三次元の点群として抽出する機器です。
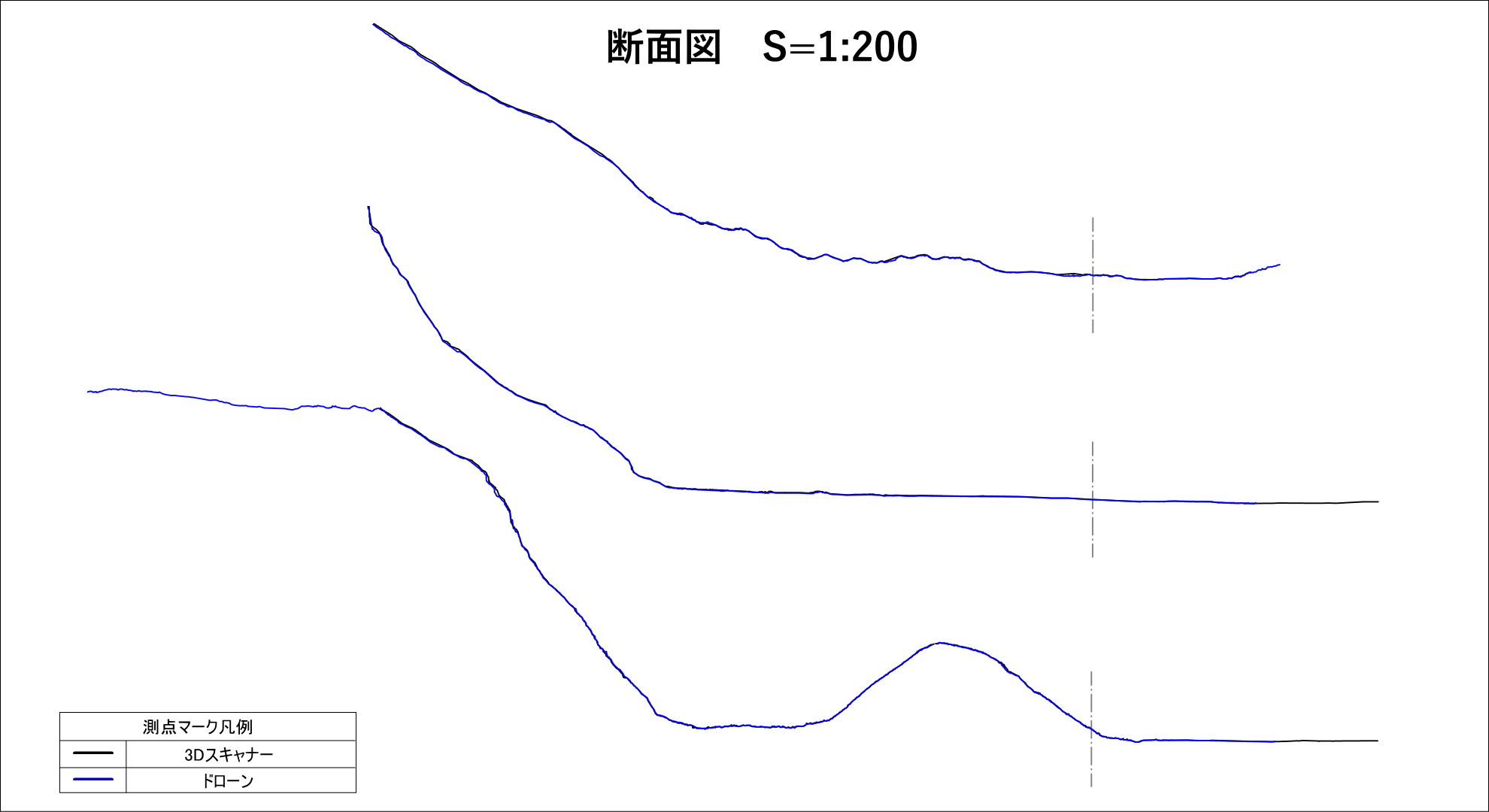
これを複数個所で計測し、点群データを合成して事物の裏面などの計測漏れがないように留意することで写真から得られる3D点群データよりも精度・密度の高い観測データの取得が可能となります。
地上レーザースキャナを用いた公共測量マニュアル(案) 平成29年3月より
『3Dレーザスキャナ使用機種』
| 『機器写真』 | 『機器仕様』 |
|---|---|
 |
|
UAV搭載型3Dレーザ測量

UAV搭載型レーザースキャナは、UAVから地上に向けて照射したレーザが反射してくる時間差で地形を計測する技術です。ただしUAV自体が常に一定速度で移動しているためUAV本体にGNSS・IMU搭載することで正確な位置情報を常に把握し、距離データを解析することで1パルス毎のX・Y・Zが計測できます。
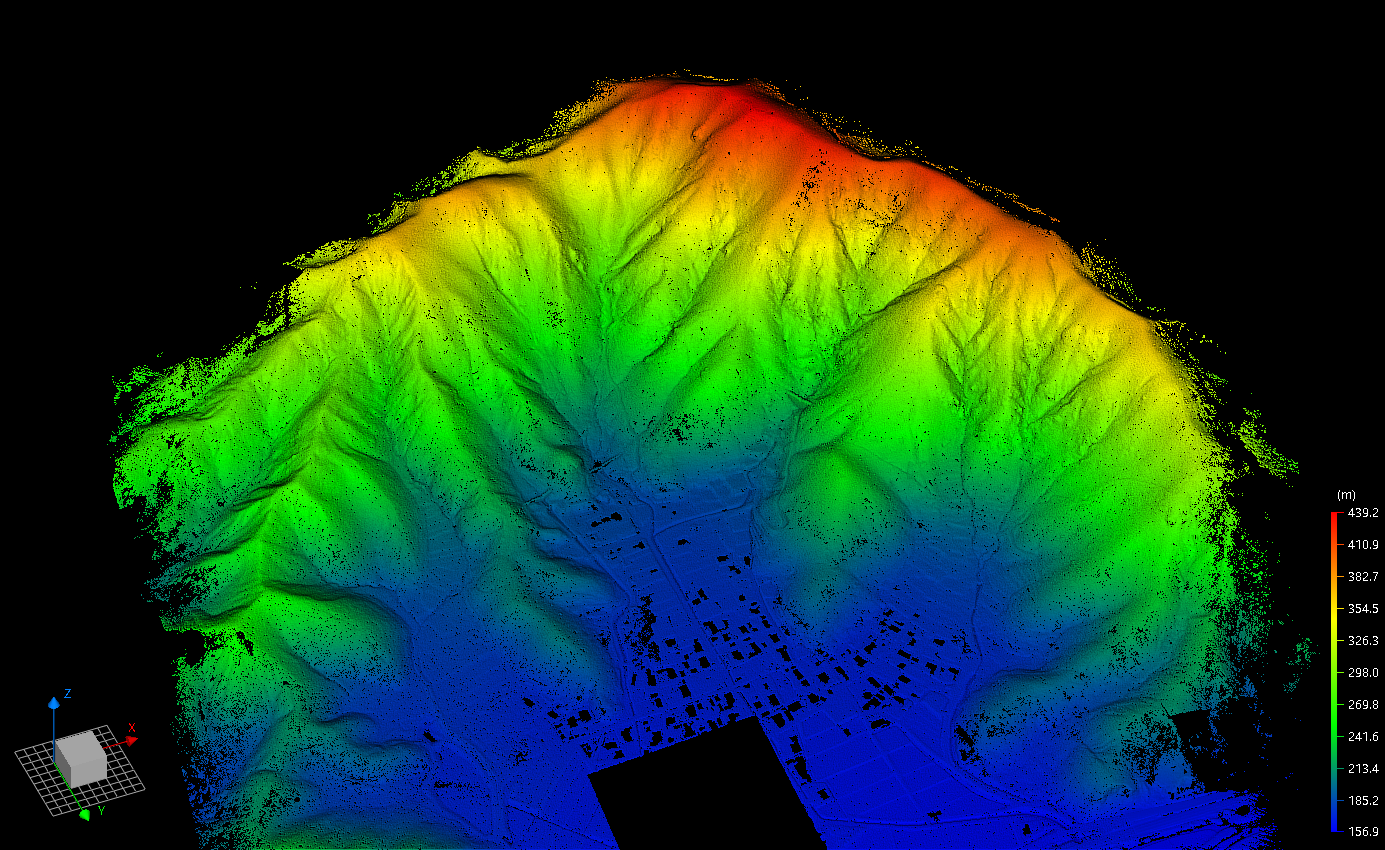
UAV測量は地上での作業と比べ、急傾斜・災害時の崩壊箇所など危険箇所の計測が可能であり広範囲を短時間で計測すると言う特徴があげられますが、同じUAV測量である空中写真測量と比較した大きな違いとして、樹木が生い茂る環境下において樹木の隙間をレーザが抜けることで地表面の計測値が取得できるという点です。
これにより詳細な地表面情報を得ることが可能となります。

『作業一連の流れ』
| 事前準備 |
|
|---|---|
| 計測作業 |
|
| 解析処理 |
|
| 図化 |
|
『事前準備』
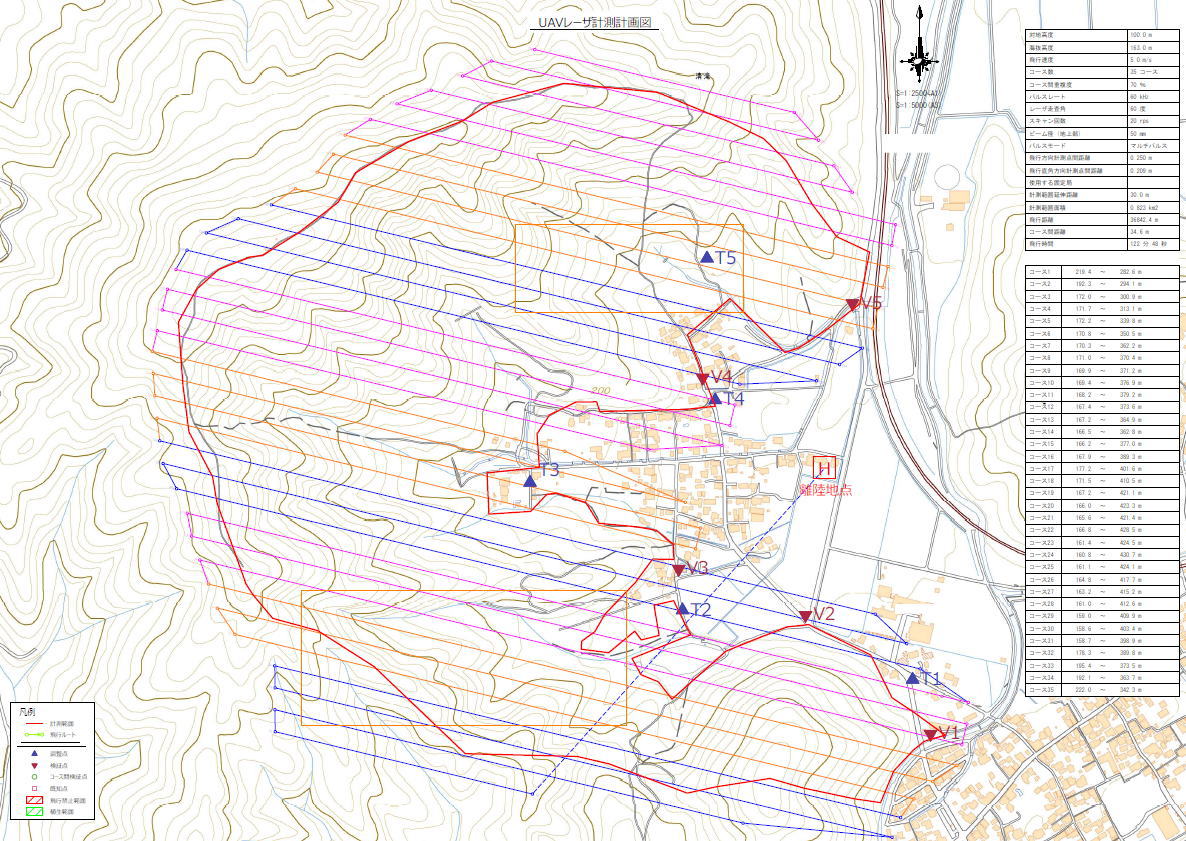
成果品要求仕様書、現地踏査、標高モデル等から作業計画の立案を行い計測飛行ルート・調整点の設置位置の計画図を作成します。
『計測作業』

まずは必要となる箇所に調整点の設置・観測を行います。この時点検手法として検証点を使用する場合は合わせて検証点の設置・観測も同時に行います。
次に作成した飛行計画をもとに計測作業を開始します。この時、まずは小型機を使用し計画と現地の安全性が確保できるか確認します。
作業は現場の状況にもよりますが、約90haを約1日程で計測することが可能です。※植生の繁茂状況によっては2~3日程かかる場合もあります。
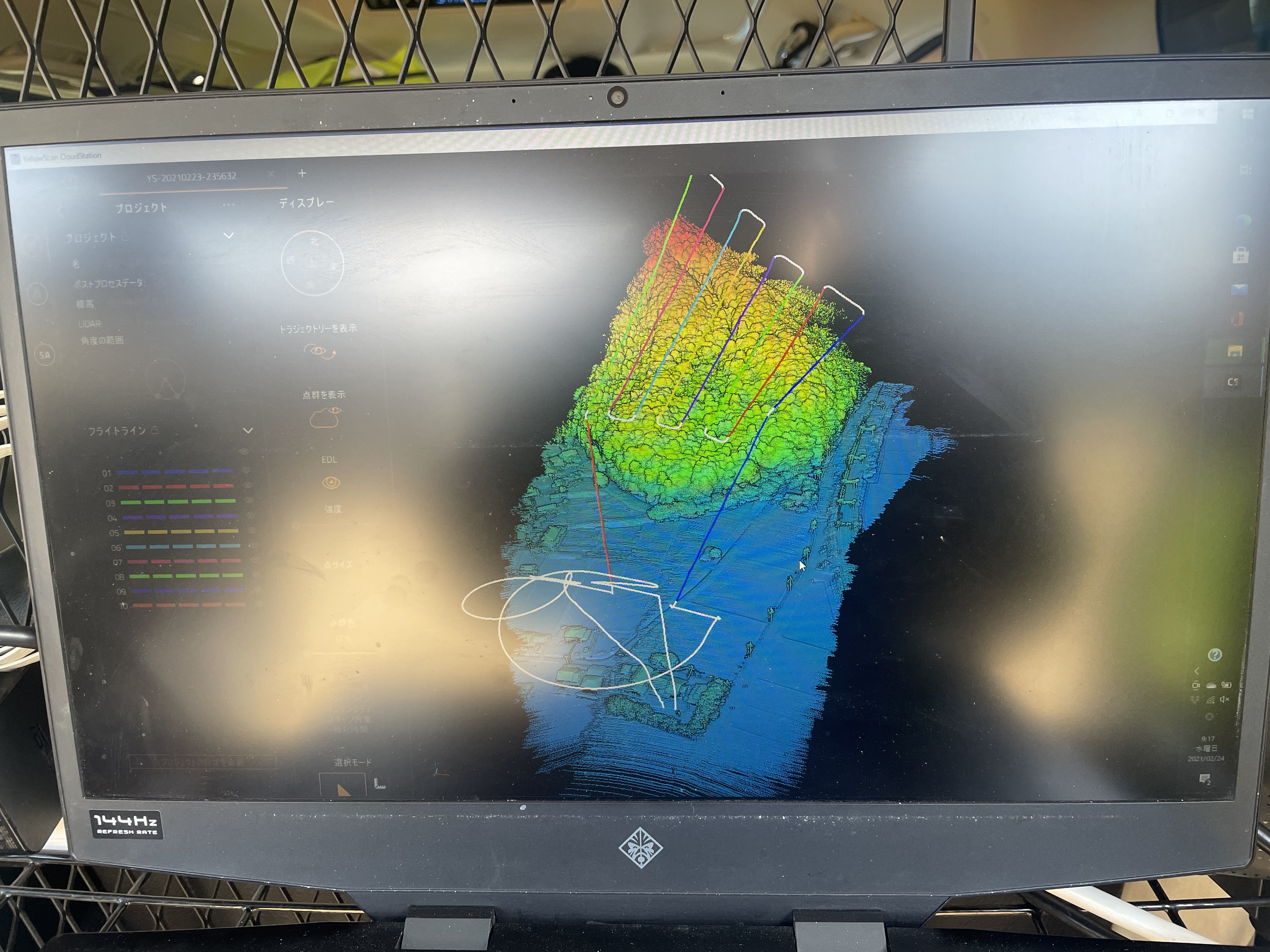
飛行中のUAVから、計測状況のデータがPCにリアルタイムで送られてき、事務所に戻らず現場で計測データの点検確認が行えます。
これにより、現場で点検を含めた計測作業を完了することができ、異常値が出た場合でも、その日のうちに再計測可能となります。
『解析処理』
GPSデータとIMUデータを用いてGNSS/IMU解析を行うことにより、UAVの飛行中の位置姿勢情報を算出し、同じく取得したレーザ測距データと統合解析することによって3次元計測データを作成します。
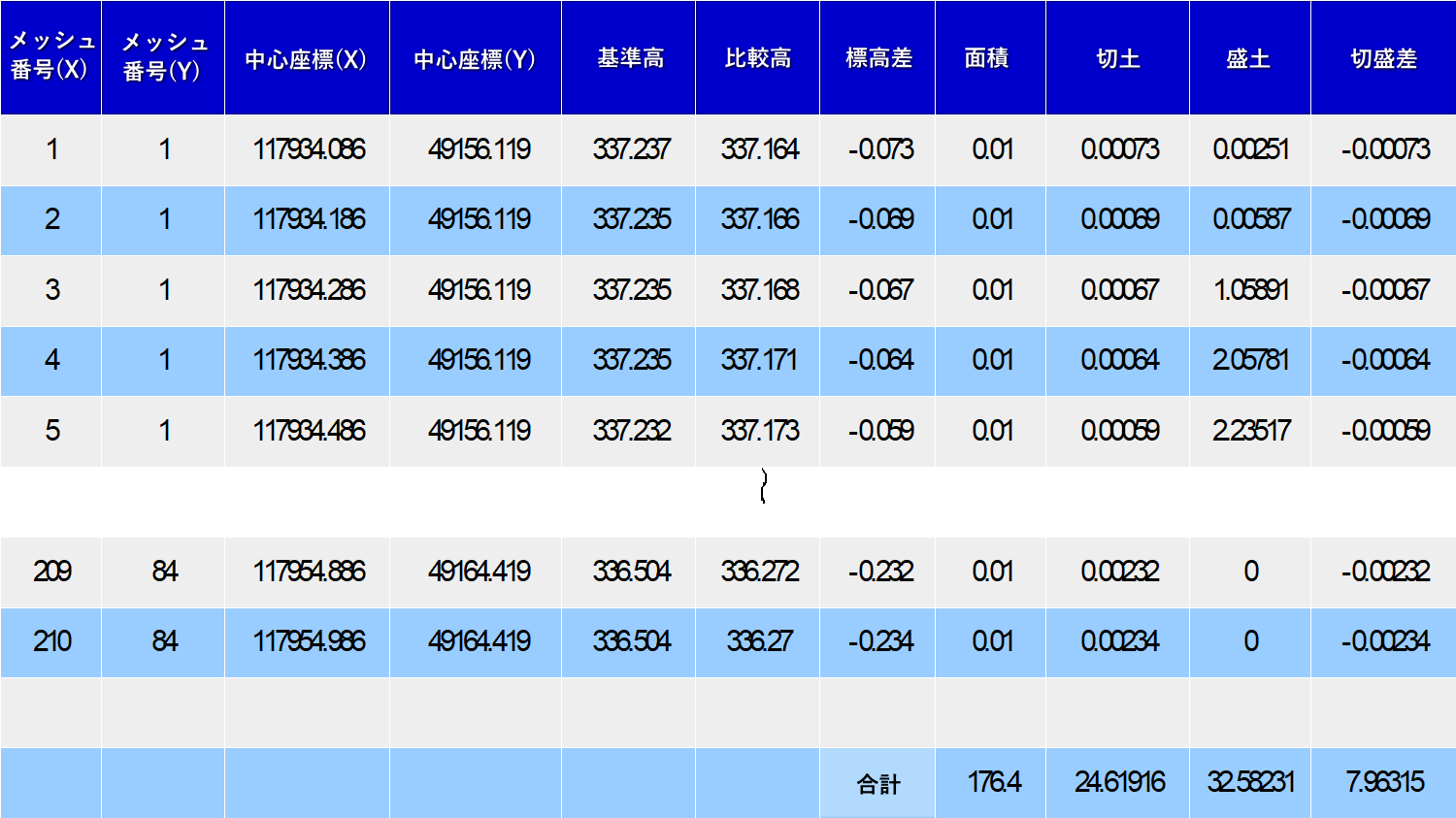
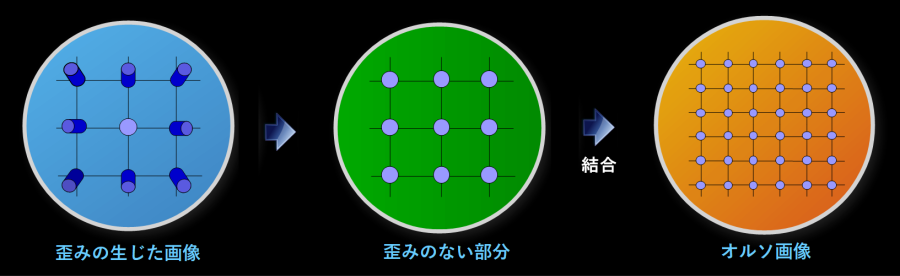
この三次元計測データを用いて、オリジナルデータ、グラウンドデータ及びグリッドデータ、等高線データ、立体地図等の成果品要求仕様書にて必要とされるデータ作成を行います。

オリジナルデータ
グラウンドデータ
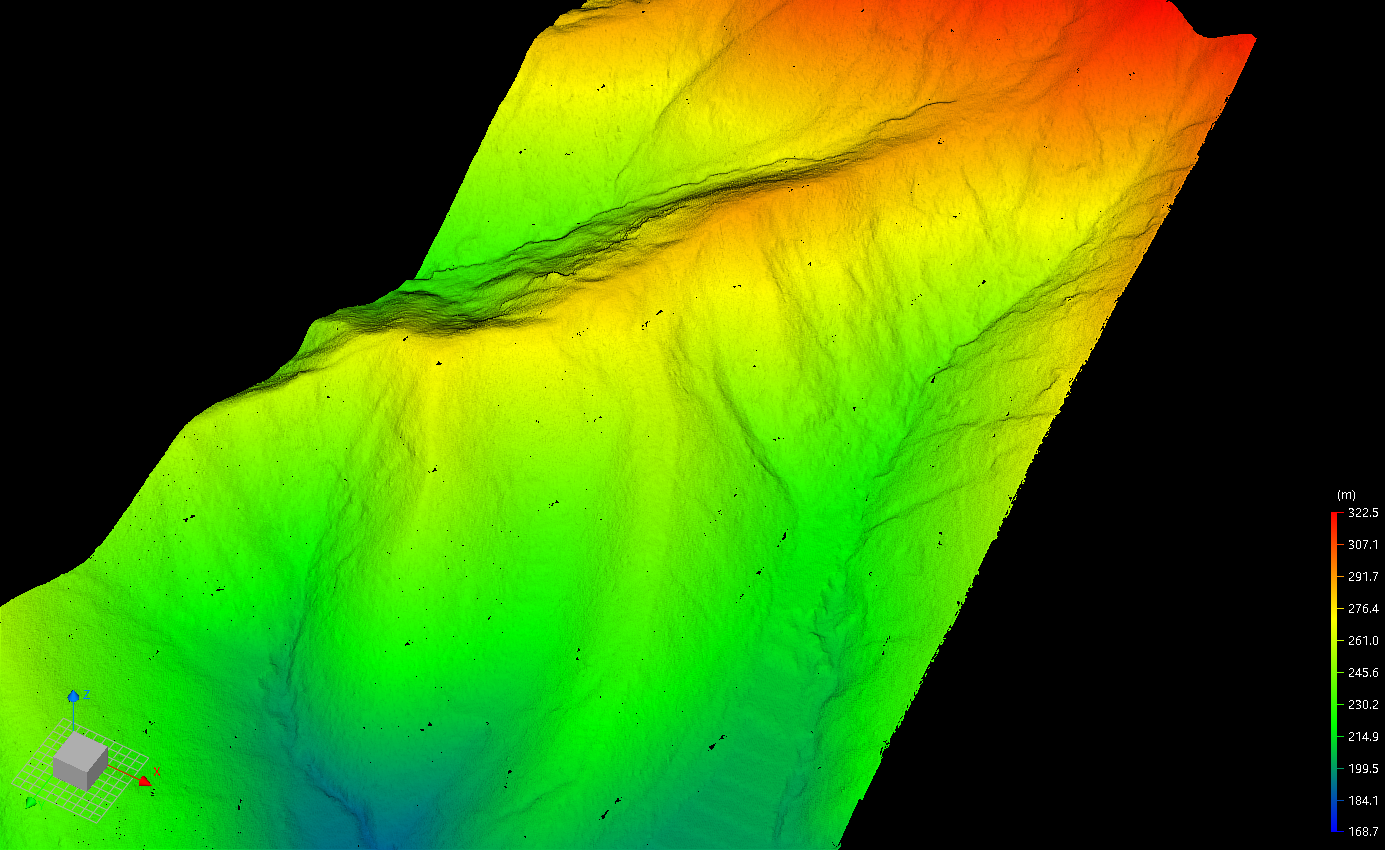
グリッドデータ
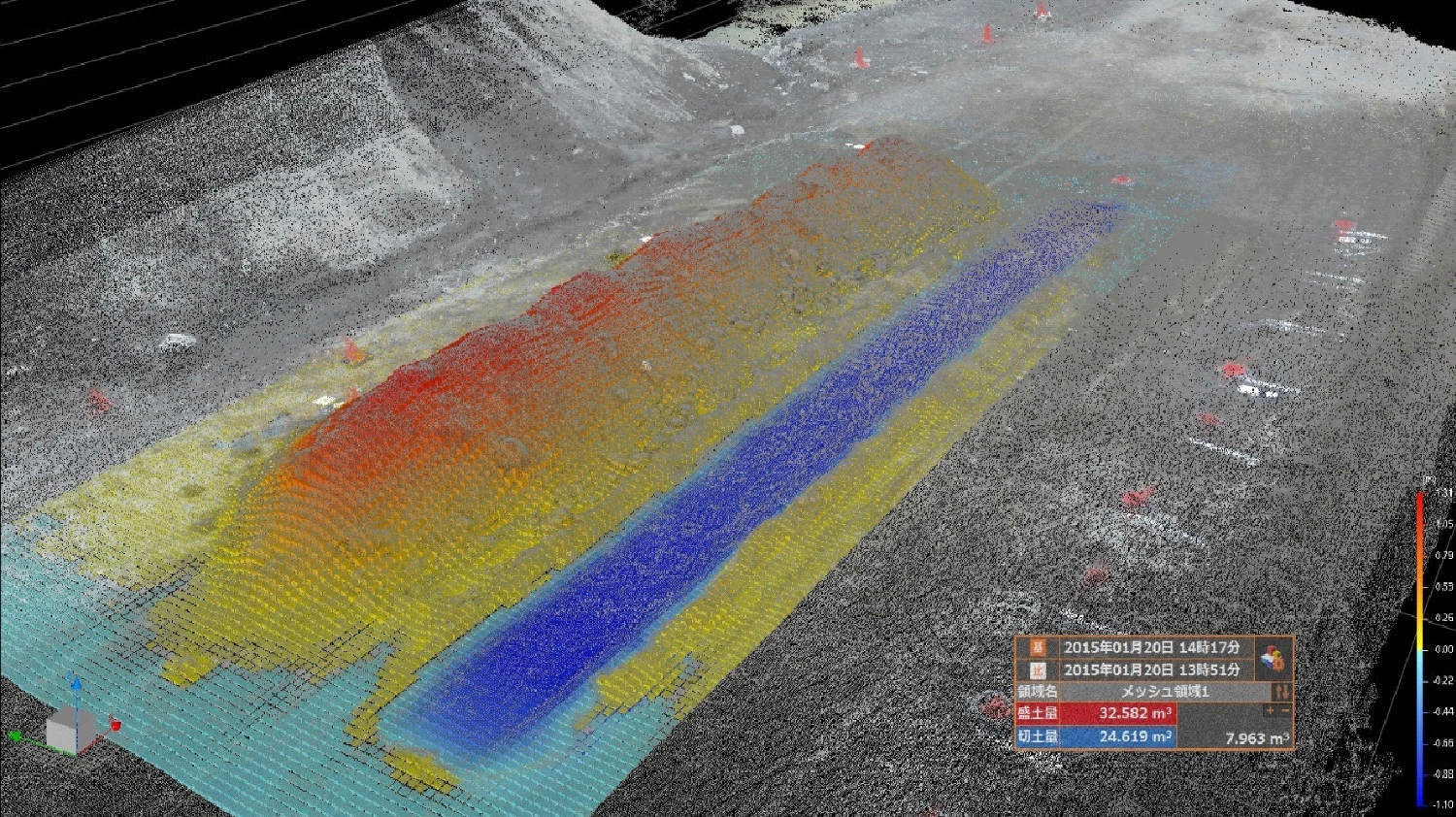
上記で作成した、グラウンドデータ、グリッドデータをもとに、断面解析、等高線解析、立体地図の作成等の解析データ出力を行います。
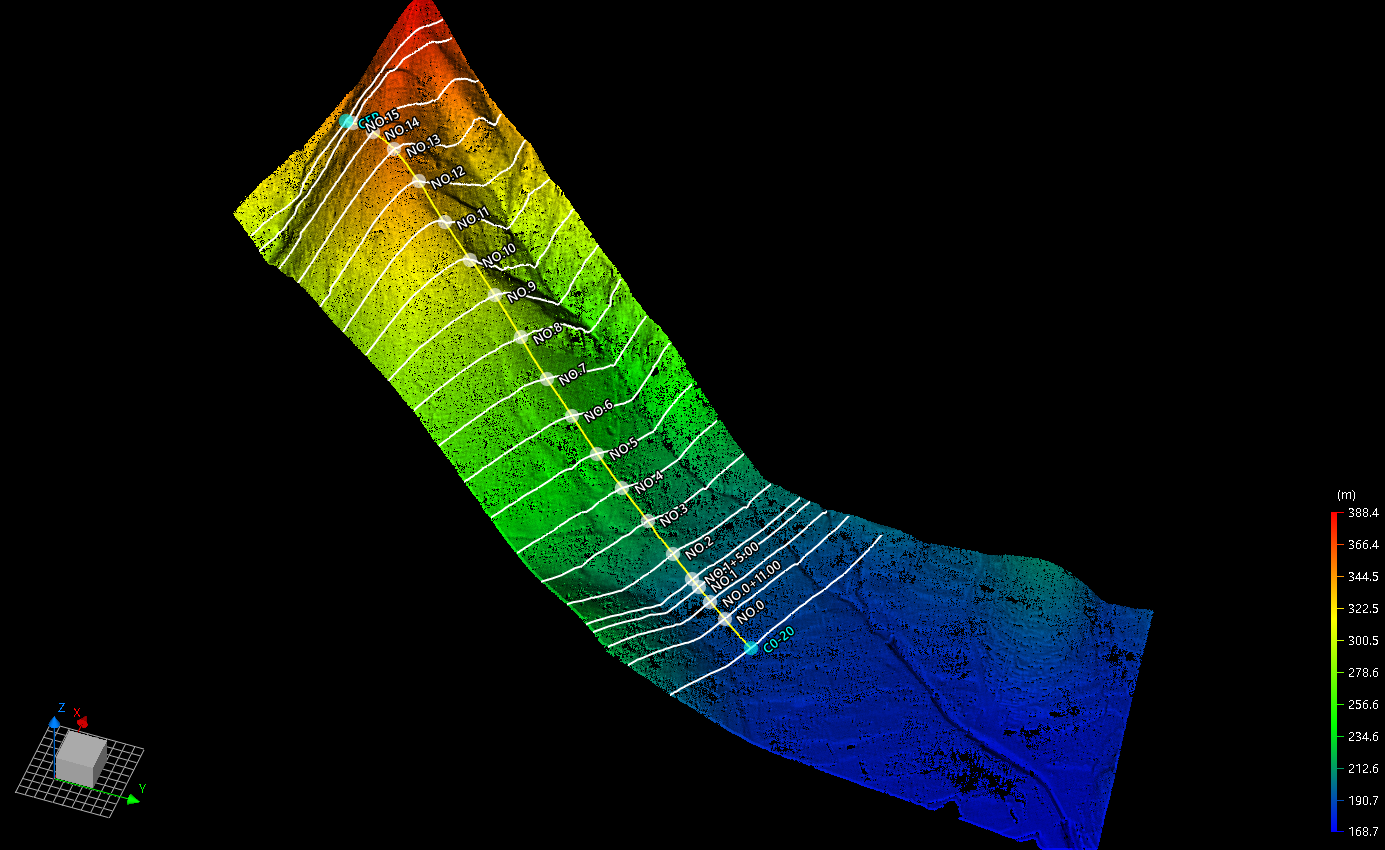
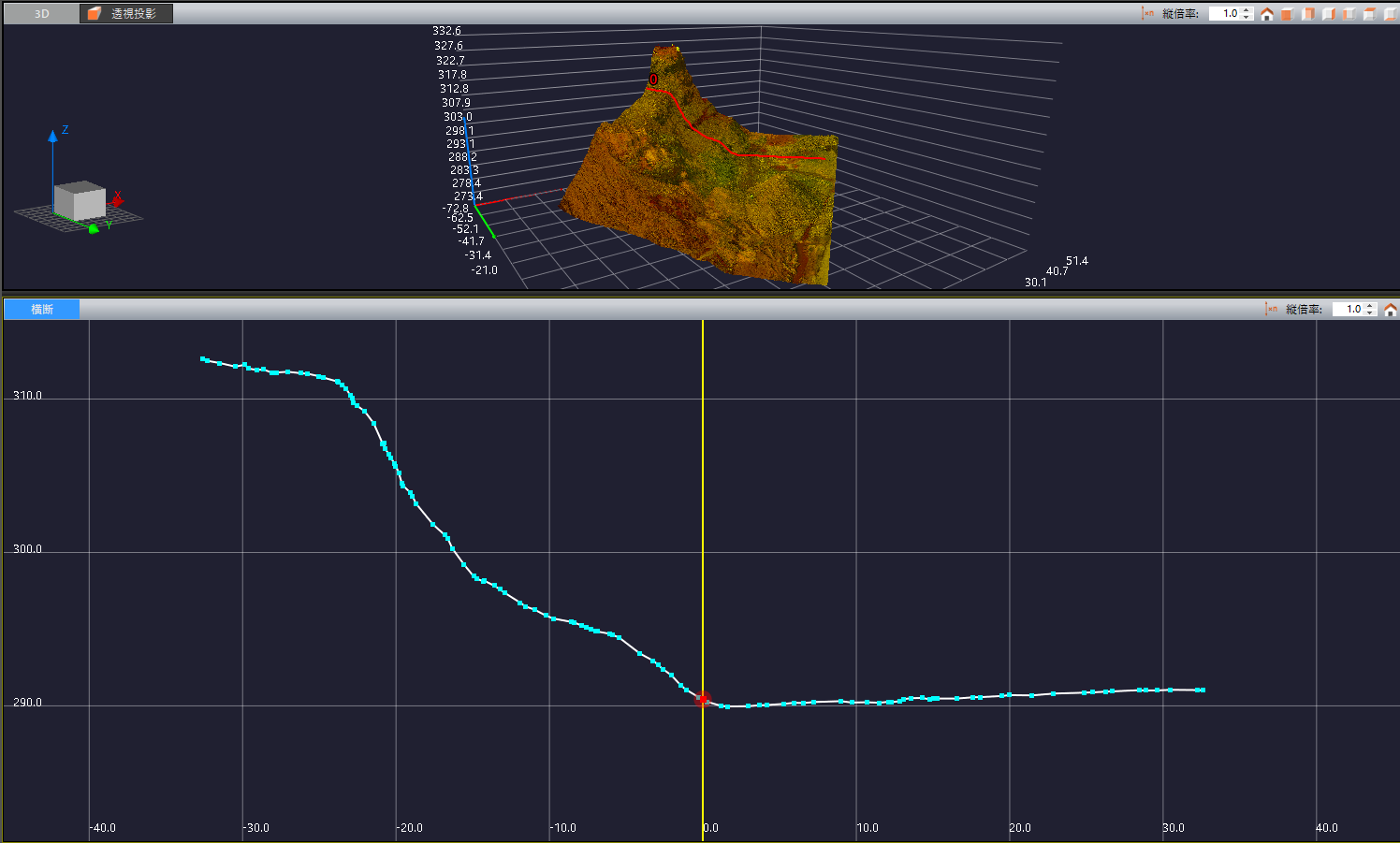
断面解析
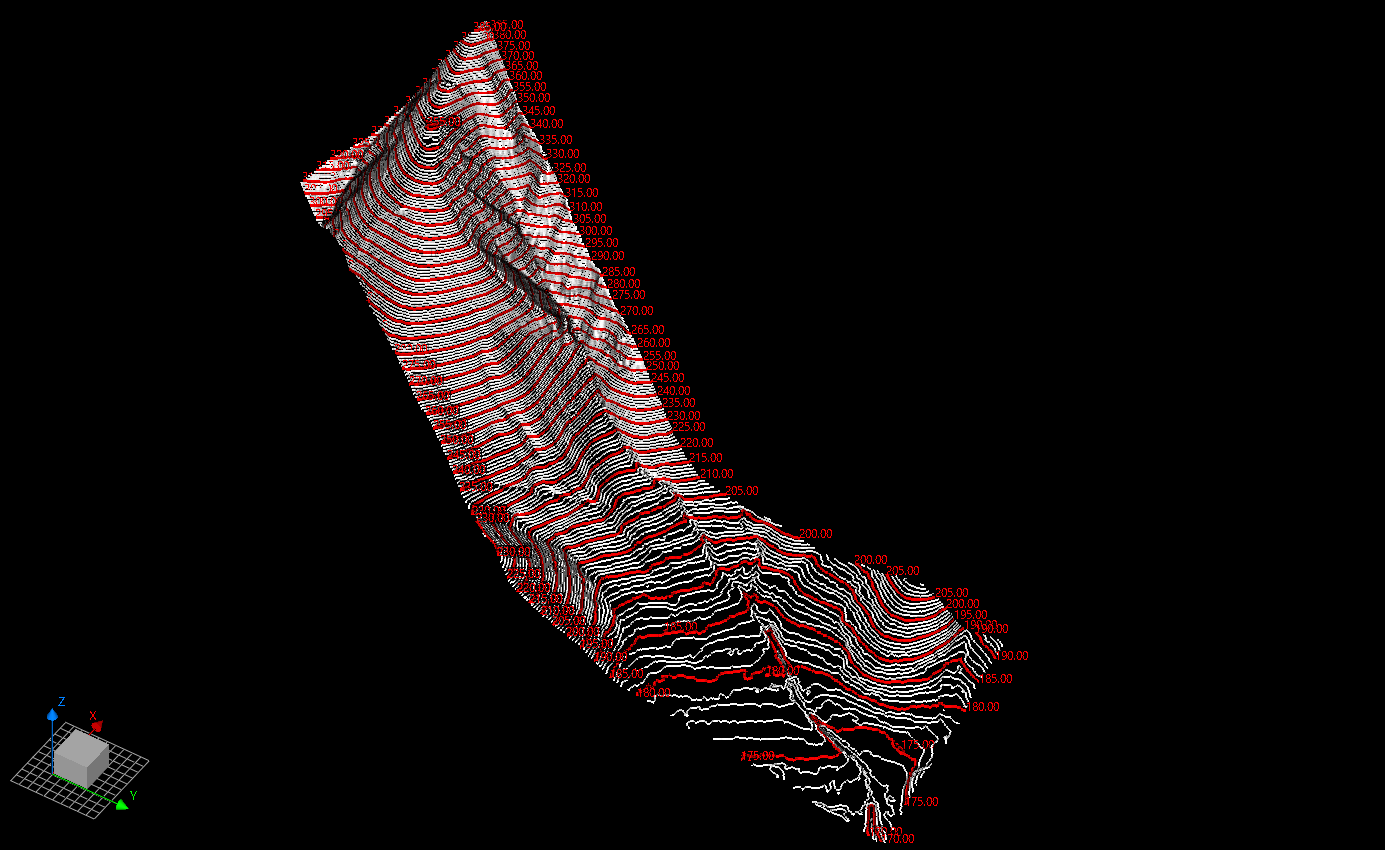
等高線解析
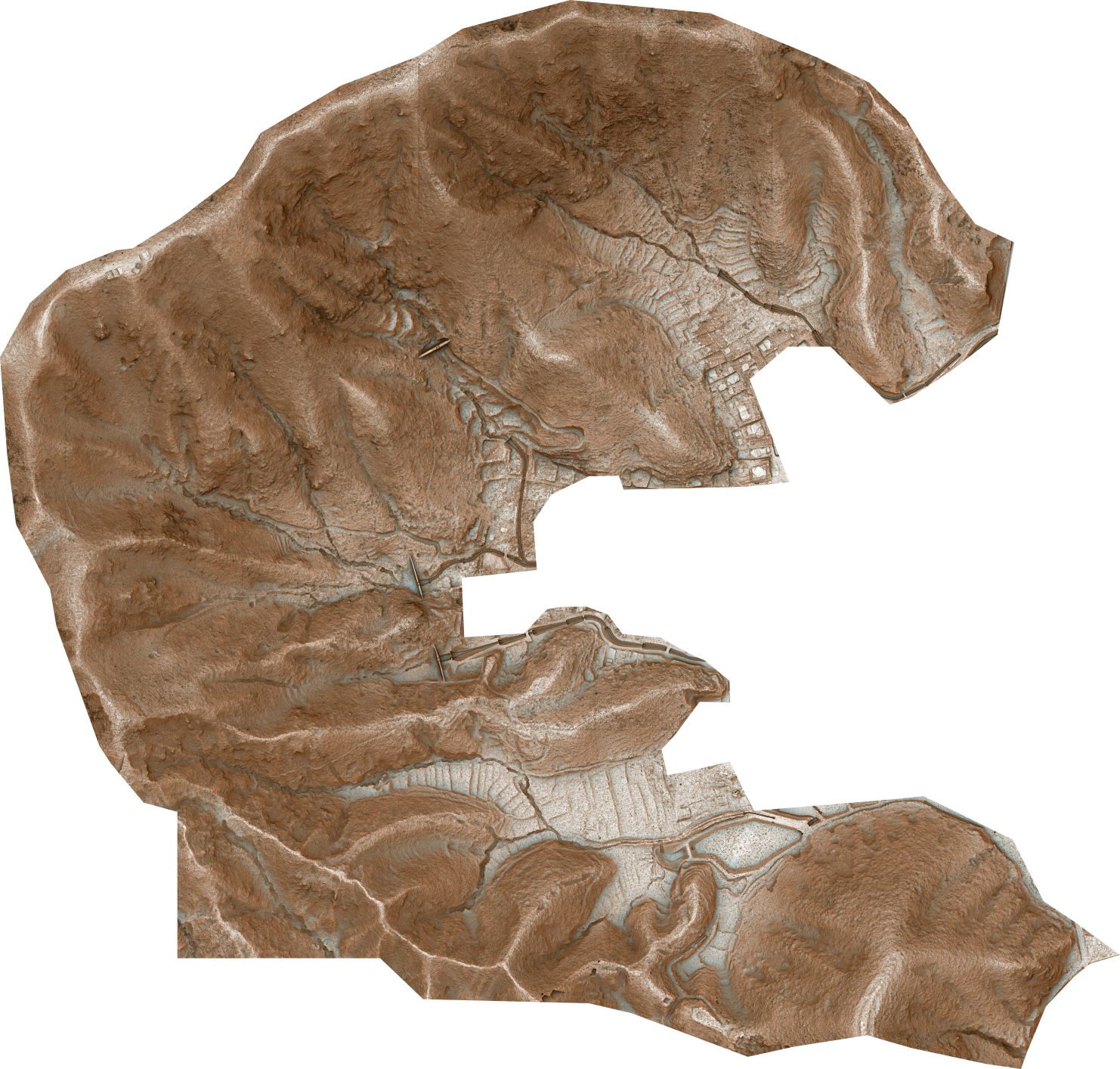
立体地図
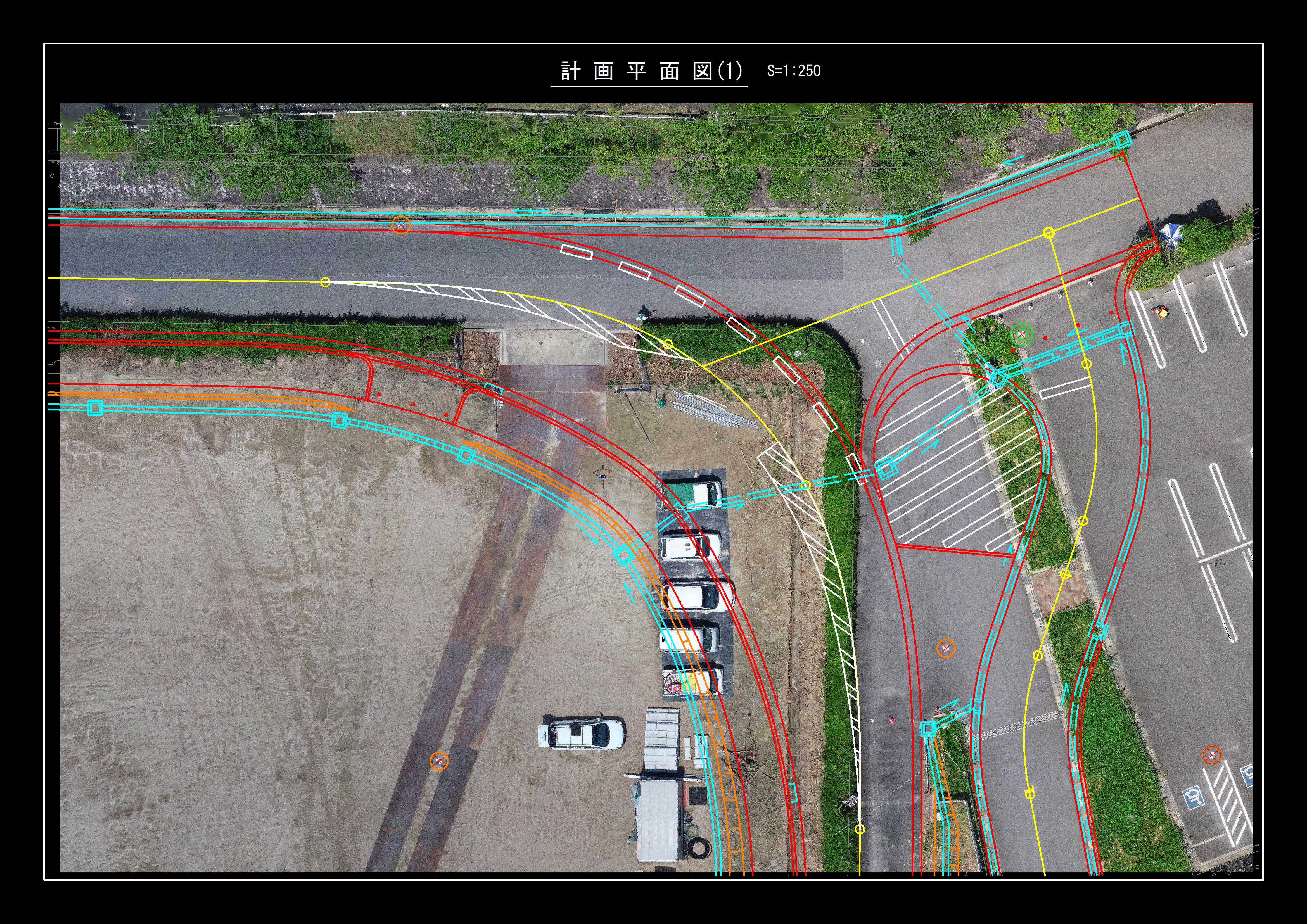
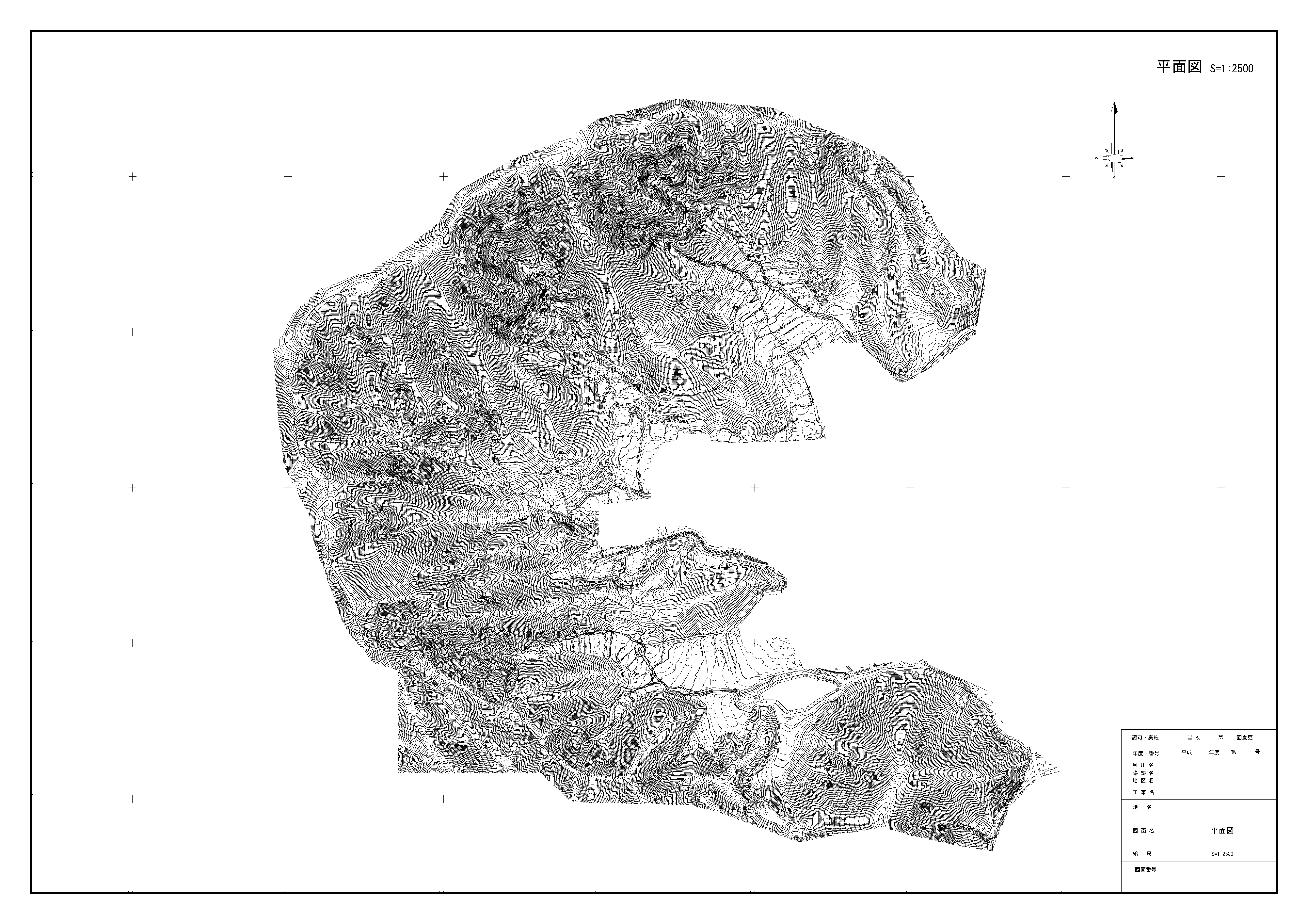
『図化』
解析処理の段階で作成した、各種データをもとに、数値図化作成・断面図作成等の図化を行います。
また計測データのみでは取得が困難な箇所もあり、そういった箇所は現地にて補測を実施することで図化の精度を高めていきます。
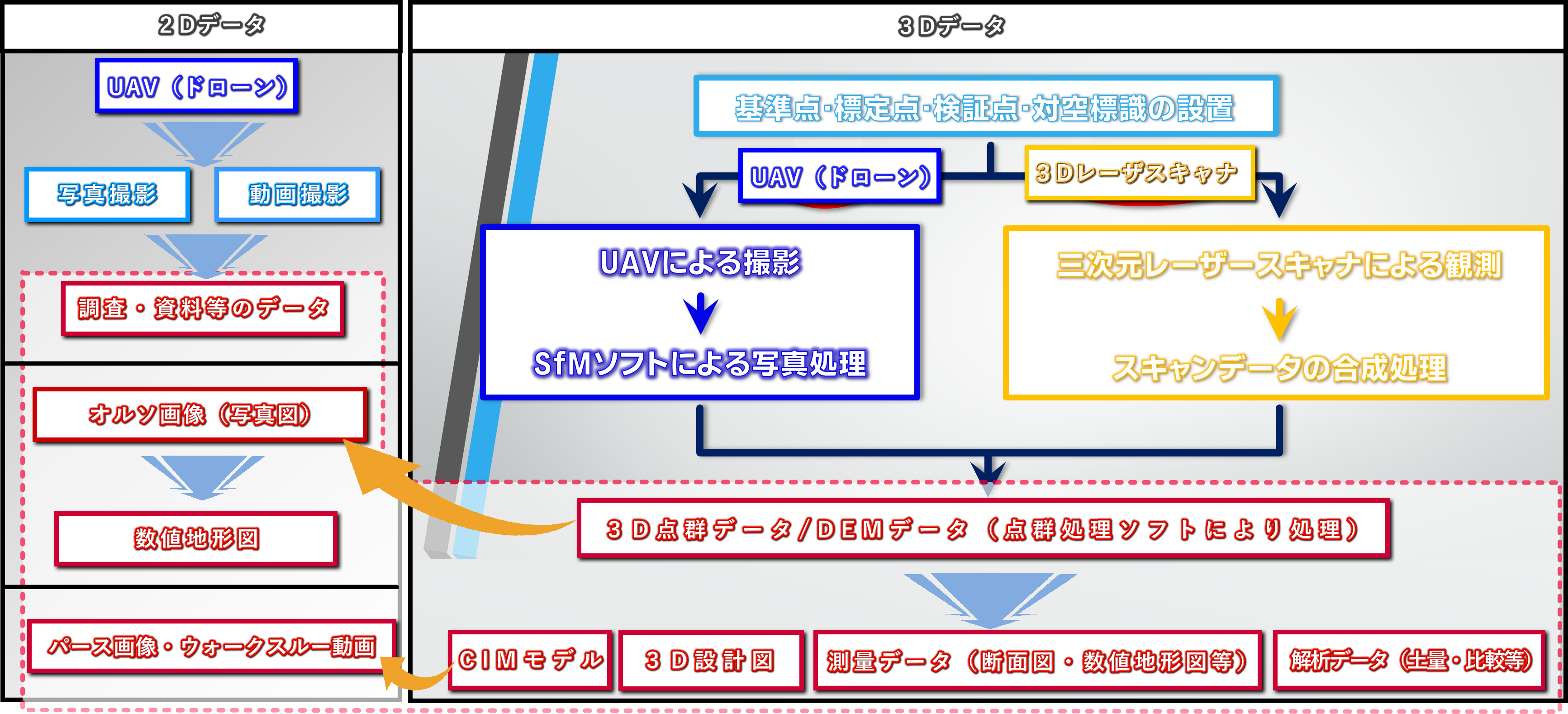
UAV/3Dレーザスキャナの成果への流用